Compete for the accuracy of the automatic operation by satellite navigation “GPS · QZSS robot car contest” is October 18, was held at the Tokyo University of Marine Science & Etchujima campus. This contest, positioning navigation Society sponsored by Joint event of “GPS / GNSS Symposium”, the eighth held in this year. Initially it began in 2006 but was only to student participants, can participate freely, even non-students now. As well this time to report the pattern of this contest, GPS · QZSS autonomous car What kind of thing whether and, you want to tell its appeal.
This contest, which previously was called “GPS Robot Car Contest”, from this year are added the name “QZSS (Quasi-Zenith Satellite)”, is supposed to compete also with positioning by QZSS not only GPS It was.
QZSS not only to complement the existing GPS accuracy, “reinforcing function” for accurate positioning than GPS by using a dedicated receiver and, message delivery from the satellite (Wazawai危 reporting) functions, such as It is also provided. In the tournament, the reinforcement functions and to achieve a high-precision positioning of sub-meter class (within error 1m), dedicated receiver to allow use of the message received “QZPOD” is lent to participants by the L1-SAIF signal of QZSS It was.
Competition contest, compete for points that can be obtained by orbiting the two Waypoint (pylon) and “double pylon race”, it is traveling on the specified route in the message of Wazawai危 report, to compete for the short transit time ” 2 events of QZSS scramble “. Double pylon race of the rule’s the same until last year, for the QZSS scramble it’s a completely new rule, which started from this year.
In the double pylon race, whereas to be based on automatic running the robot car the position information of the pylon, which was informed in advance, QZSS scramble is not informed of a travel route to the race just before, the message from the satellite with the start of the competition receiving, is that to automatically run according to it significantly different. By the way, the message delivery also includes signal that identifies the race robot car, the location of the chuck point of three locations that are designated as the target is different for each robot car. The event is due to the cooperation of the SPAC (satellite positioning utilization Promotion Center), for the purpose of this contest, delivery QZSS first aircraft from the “MICHIBIKI” special message has been carried out.
Hardware regulation of the autonomous car is common both rules, power principle is an electric as. Dimension, at the height of a posture in competition 400mm or less, the width and depth 500mm below. Or when you are disassembling the robot to carry in a bag, referring to the magnitude of the sum of the three sides of the size of the bag is that it can bring in the next and 55 × 40 × size to fit within 25cm (100 seats or more in the domestic aircraft 115cm and it is defined and using it) and the. Weight, including all the equipment required for autonomous within 9kg in total. However, such as notebook PC and battery charger, it does not include the equipment to be removed during the competition can be connected only during setup. The body is slightly smaller provisions, by participants from afar is to limit the size that can be transported by air, it is because you are in so that there is no advantage-disadvantage by region.
The many of the participants as the basis of a robot car that fits such a provision had been utilized, it’s hobby radio control of the chassis, such as Tamiya. Such as buggy and big tires, it was seen many things that was modified the chassis suitable for off-road driving. However, some are also those using the original chassis without using radio control was also one of the unique shape of the motor is built in the wheel side.
The navigation sensors using the GPS receiver, which autonomously traveling is a condition in accordance with the control program. The GPS receiver, some teams that use the QZPOD that was rented, was also the team to use a commercially available GPS chip. Remote operation in competition can not be performed, it is necessary that all the autonomous control unit is mounted on the autonomous car. However, carrying out communications to the outside in order to monitor the state of the robot car it’s possible. GPS receiver and a microcomputer to be used is generally to the use of products that are commercially available is desirable, on the assumption that it will be public information, is also a possible participation in the remodeled receiver.
Available satellites GPS, QZSS, in SBAS, other than these satellites are available if positioning method at the receiver itself. However, it is only in this contest, RTK robot car that uses a (real-time kinematic) positioning is participating.
The RTK positioning, divided into the reference point and the mobile station to communicate the observation data of a receiver in a wireless one way of “interference positioning”. Equipment is more expensive compared to the “autonomous” that have been used in such as smart phones of GPS, but it is possible to realize a high-precision positioning enough to be used in the survey.
This time, mistakenly interpret the rules in the participating teams, there was a team that came with a robot car that uses the RTK. This contest is in principle in single positioning only, although not to if RTK was recognized originally, this time it was recognized as a special case. As will be described later, team “Waseda University Amano laboratory (robot name: Kevin)”, which was adopted this RTK has a strong presence in the tournament.
Contest venue that became Tokyo University of Marine Science and Technology, Etchujima campus of the ground, in the field the entire surface of a spacious lawn, here are 21 teams were gathered. Participants other laboratories and high school students of the university, individuals also participated 4 are included team. And entry is all 21 team team to double pylon race, the QZSS scrambled 7 team has entry.
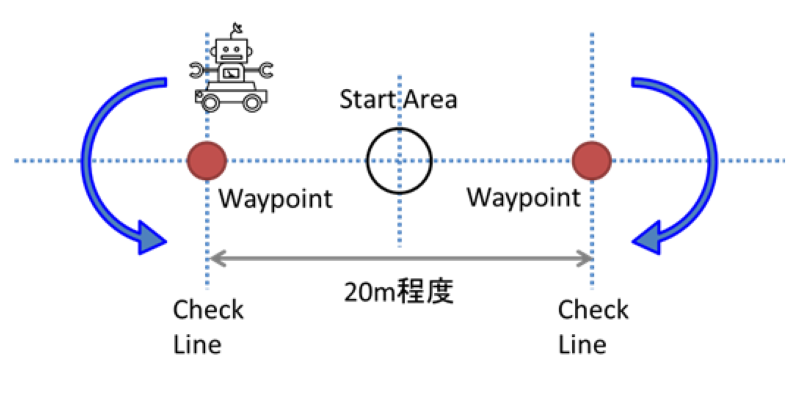
Contest, is divided into the first half and the second half the participating teams of double pylon race, conducted in the first half of the race first. Then, across the QZSS scramble, the second half of the double pylon race has been carried out. Double pylon race, and by the shape of the running 8 relative to the two pylons apart about 20m, which compete the number of turned. At the middle point of the starting point two pylon, the competitor of allotted time is 3 minutes preparation time, the competition time is it 5 minutes.
However, do not start is quite autonomous car even start is told, you can get stuck, you can accidentally be carried out by running a predetermined course to the far removed from direction, the direction is to follow in the vicinity, but the pylon matches wearing to be or gone he ran directly straight without changing the direction can have a robot that becomes the DNS (not start) and retired was one after another.
By the way in this competition, around how the pylon it does not matter in either direction. However, to avoid a simple circular motion that is not controlled, it is necessary to turn to the figure eight. It is possible to declare the number of times of retries if the competition time, if Rarere recognized declare the referee, it can be restarted. Also, a robot car if the stuck are not able to avoid obstacles, or move the competitor obstacles, although it also possible to change the direction of the robot car, in which case it is deducted from the total points.
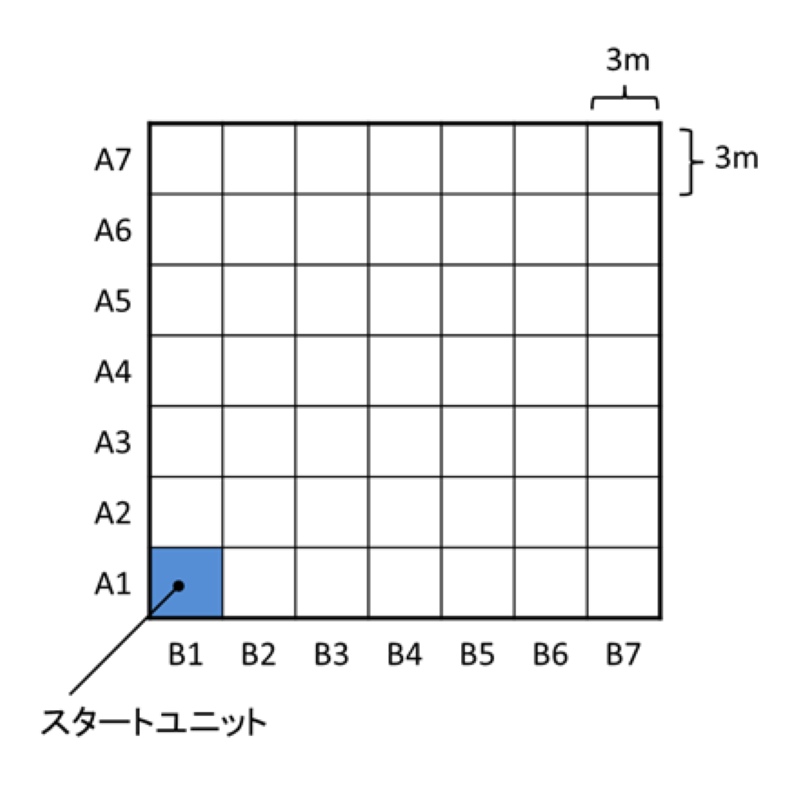
QZSS scramble is also similar to the double pylon race, many teams have struggled. In this playing field, 3m square grid (units) 49 (7 × 7 pieces) aligned to provide a grid. Contest that day, the exact location information of this grid (latitude and longitude of the center of the unit of three places out of the unit on the corner) was transmitted first to the competitor. Competitors, turn on the power by placing the robot car in the unit to be a start location to 2 minutes before the time at which the message is delivered from QZSS. Then, through a message from the QZSS, unit of three locations designated as checkpoints therefore is notified by the value of the X-axis · Y axis of the grid, the robot car checkpoint accordingly, which is the start of the control and designated it becomes possible to perform decoding of latitude and longitude.
The left superior results to stand out in both competition both is’s Kevin described above. In the double pylon race, or gone to the other pylon without orbiting one of the pylon, to be or from the original direction of rotation got around in the opposite direction, although there were some errors, in the firm run and earn points around the pylon several times, he won brilliantly first place.
In QZSS scrambled, they had arrived in three locations of the checkpoint unit of the message street from QZSS with only Kevin, even here has won a stunning first place. For QZSS scramble, Abunagena However absolutely no, it arrived follow exactly to the specified unit, and by changing the direction to move smoothly to the next unit. In its maturity of height, voice of praise has been a large number submitted from the gallery.
Kevin is based on the chassis of Tamiya RC kit “black foot 3”, on top of the rear portion of the vehicle body, and loading the mini-PC of Windows installed that LIVA of ECS. We are turning a fan to cool the PC on its upper part. LIVA is an inexpensive PC that you can buy at about 20,000 yen, for driving by the mobile battery is possible, can be easily installed in the radio control of the chassis. The advantage as compared with the microcomputer, and a point that easily connected to the serial communication and Wi-Fi. In Kevin, I thing this PC is of as being used for the positioning calculation and path planning of RTK.
Those of the rod-shaped projecting to the vehicle body front portion, a write to indicate that it has received a message from QZSS, indicating that it has received around and shiny as to receive signals QZSS. In addition, also light when it reaches the checkpoint, it is possible to notify the state of the vehicle body around it.
Although QZPOD The rear portion of the vehicle body is mounted, the QZPOD is used only to receive Wazawai危 notification message from QZSS, it is not used for positioning. As mentioned above for the body of the position estimation, we’re using one frequency RTK positioning using GPS. Interaction with RTK fixed reference station is carried out by connecting to the Internet via WiMAX routers attached to a vehicle body front portion. Antenna is about ¥ 150,000 of RTK attached to the vehicle body. It is fairly expensive than regular GPS antenna, this addition to about the same cost antenna for the fixed reference station.
Akira-hi Ken’s Waseda University Faculty of Science and Engineering Research Institute is a production leader of Kevin is, about the difficulty and charm of GPS autonomous car production, “robot car is said to be very small, it is one of the system. Thus, the system It does not work well when there is even one trouble to the elements. poor contact and the battery out of the connector, loose screws, such as sensor output error by mistake in the startup procedure, it is a simple problem if you look at it one by one, that all The is where it is difficult to manufacture not carefully completed If you do not clear. On the contrary, when that all went well, a small radio-controlled body, the tremendous scale that aim to destinations rely on a signal from the satellite is greater We achieved that. talk and there will think that there is a charm and romance. ”
Speaking of the robot car contest, but in addition to there is a tournament called “Tsukuba Challenge”, here satellite positioning is not the main tournament. Akira ratio Mr. for the charm of this tournament when compared with Tsukuba challenge, “the big difference is that the equipment is small. We, subgoals placement and steering control method of the (target point should pass through), such as the control parameters by trial and error in a variety of patterns, as a result, it was able to achieve a two-event winner. Never hand, even if the findings obtained by these trial and error, has a calculation in front of the desk It does not go into. through the tournament, by the repetition of the experiment, I learned the importance of building a better one. This is the cove teacher such as Kumamoto technical college with us to plan and manage a great tournament and I am grateful. ” and it told.
On the other hand, he had won the second place second only to Kevin in double pylon race, “The University of Electro-Communications Robomeka workshop (robot name: Luchs)” s. Luchs also, or got around in a direction opposite to the direction that should turn naturally in the pylon, to be or I went go straight to not rotate even after the pylon, several times, but trouble has occurred, several times pylon is succeeded in turn, it became runners by stacking point. Whereas Kevin is using an expensive RTK receiver, Luchs are using a commercially available inexpensive GPS chip, the manufacturing cost is also quite cheap. Such contrasting robot car is was interesting that was the result, which accounts for 1 and second place.
According to the Tanii Kentaro is a one of the development team of Luchs, production cost of Luchs, it of the radio control kit that becomes the base also including total 2-30000 yen. Such as the steering servo and speed controller you are using inexpensive parts for radio control, we are using the “mbed” popular microcomputer board alongside the Arduino to the microcomputer.
According to the Tanii said, a minimum to make a GPS robot car, what is needed “is a driving part RC (or gear box and the mechanism run like a combination of the tire),” “motor driver part to move the drive unit”, “current position and a sensor indicating an orientation GPS “” by processing information from the sensor and by the PC “of microcomputer”, “program issues a command to the motor driver, in addition to more controls who had magnetic compass module in that it is more likely. Tanii says the “In recent years there is a microcomputer board that can handle easily, such as Arudino, threshold of participation because there are a lot of sample programs I think are becoming low.”
Tanii said, as comments to this contest, “It was the first participation this time, and I think it is most of the difficulty is the contest to be performed outside. GPS is to not be able to receive it and actually do not go out , the venue is not necessarily outputs coordinate also stability of a wide lawn of environment is required .GPS module even if the test because it is grass, and or affected by the ambient also magnetic compass, a variety that is different from the indoor competition Since there is a problem, it is also a Shidokoro of ingenuity, I think that interesting. In this contest, good is actually best results when you test it first came, it would run the point that subtly shift in production year. Since the reproducibility was high, seems to have gone subtly coordinate point is changed by time. Next year it incorporates by this problem, and to improve the software you would like to participate, “he said.
Although tolerance that would RTK positioning also recognized as a special case, which is the original if the rule violation there is one of the charm of this contest, while the attitude to the competition itself in any team also indeed serious, the aircraft that we had made I was struggling and trying somehow to run decent. Than winning or losing, spacious and that immersed in Udekurabe of autonomous car production using satellite positioning in the ground, it’s the feeling that dying itself fun.
Hiroki Mr. Irie of a competition person in charge of the contest Kumamoto National College (Kumamoto National College of Technology) (building society Design Engineering, Professor), for the charm of the contest, dealing with “software, hardware, and the radio waves of the satellite in a complex manner Since the technician is small, there I think is fun where you can challenge. You can easily double pylon race, it is possible everywhere feel free to challenge by setting the course on their own even after Kontensuto the end, I say that it means I want to try. ” The people who have interest, and the challenge of autonomous car production to align the material, you wonder how you can consider the participation of the next year.